I. ĐỘ CHÍNH XÁC LƯỚI GPS VÀ THIẾT KẾ ĐỒ HÌNH LƯỚI
1. Độ chính xác lưới GPS:
Trị đo GPS đạt độ chính xác các yếu tố theo bảng sau:
|
Khoảng cách |
ms/s |
ma |
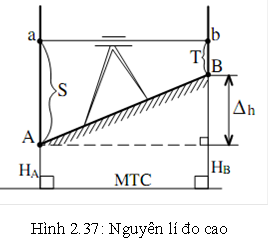
mDh |
|
30 km |
1/700 000 |
0"2 |
4.3 cm |
|
20 km |
1/500 000 |
0"4 |
4.0 cm |
|
10 km |
1/300 000 |
0"7 |
3.3 cm |
|
5 km |
1/250 000 |
0"8 |
2.0 cm |
|
2 km |
1/200 000 |
1"0 |
1.0 cm |
|
1 km |
1/100 000 |
2"0 |
1.0 cm |
Khi các trị đo GPS kết cấu thành lưới độ chính xác các yếu tố sau bình sai có thể tăng lên hơn nữa tùy theo kiểu đồ hình.
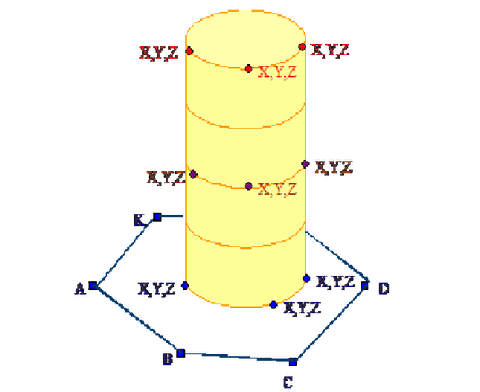
2. Đồ hình lưới GPS:
Nhìn vào bảng liệt kê độ chính xác ở trên, chúng ta có thể thấy sơ bộ là độ chính xác của trị đo GPS cao hơn độ chính xác của các yếu tố lưới thực hiện theo công nghệ cổ truyền. Vì vậy về nguyên tắc chúng ta có thể đơn giản hóa dạng đồ hình của lưới.
Để đảm bảo an toàn, chúng ta vẫn chấp nhận dạng lưới tam giác hoặc đa giác cho các lưới hạng I, II, III, IV Nhà nước. Đối với các lưới hạng thấp hơn chúng ta căn cứ vào yêu cầu độ chính xác đặt ra để thiết kế cho phù hợp. Để xác định độ chính xác dự báo của lưới chúng ta dùng chương trình máy tính tính độ chính xác của lưới.
3. Thiết kế lưới GPS.
Để thiết kế lưới GPS chúng ta thực hiện theo các bước sau:
- Thiết kế sơ bộ trên bản đồ theo độ chính xác yêu cầu.
- Chọn điểm ngoài thực địa phải bảo đảm các yêu cầu sau:
+ Điểm không được đặt gần các trạm phát sóng vô tuyến mạnh (nằm ngoài bán kính 500 m).
+ Điểm không đặt quá sát các nhà cao tầng.
+ Điểm không được nằm dưới các tán lá cây quá rậm.
+ Điểm phải thỏa mãn các yêu cầu sử dụng của lưới.
- Lên điểm lại trong thiết kế chính thức.
- Chôn mốc ngoài thực địa với quy cách mốc theo yêu cầu của từng loại công trình.
Qua những quy định trên của thiết kế lưới GPS, chúng ta thấy loại lưới này không cần thông hướng giữa các điểm nên có thể bỏ qua bước phát hướng và dựng tiêu.
II. ĐO GPS
Máy thu 4000-ST SURVEYOR là loại máy thu GPS 1 tần số. Khi sử dụng máy chúng ta phải đảm bảo các yêu cầu sau đây:
1. Xem xét bộ phận chống ẩm phía sau máy, nếu chỉ số quá 60 thì phải tháo túi bột hút ẩm để rang lại bột hoặc thay bột mới.
2. Người sử dụng máy phải thuộc kỹ bảng quy trình sử dụng máy thu GPS TRIMBLE NAVIGATION 4000-ST (xem phụ lục kèm theo).
3. Lắp đặt máy lên giá 3 chân sau khi đã cân bằng đế máy thu, lắp ắc quy vào máy, bật máy và theo dõi sự kiểm định 8 kênh thu, kiểm tra sự hoạt động của các phím cứng trên máy.
4. Theo lịch đo đã lập ở phần trên, chúng ta đưa kế hoạch đo vào máy thu bằng phím cứng SECTION trên máy. Sử dụng phím cứng Control để xóa đi các tập hợp trị đo không cần thiết (xem quy trình sử dụng máy thu).
5. Tại mỗi điểm đo chúng ta đặt giá 3 chân, định tâm và cân bằng đế máy, đặt máy lên đế máy, khởi động máy, kiểm tra lại kế hoạch đo đã ghi vào máy, sử dụng phím cứng Control để đặt các chế độ thu vệ tinh thích hợp (xem quy trình sử dụng máy thu).
6. Đặt máy thu theo chế độ đo tĩnh có chương trình ở loại chương trình điều khiển hay chương trình tự động tùy theo thói quen của người sử dụng (xem quy trình sử dụng máy thu).
7. Trong quá trình máy thu ghi số liệu người điều khiển máy phải làm 3 nhiệm vụ:
- Theo dõi sự hoạt động của máy thu, đặc biệt lưu ý tới độ liên tục ghi tín hiệu và khả năng dòng điện bị ngắt do chạm tay vào đầu cắm (xử lý theo quy trình sử dụng máy thu).
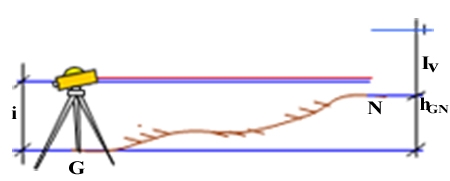
- Tại đầu, giữa và cuối thời gian đo phải ghi số liệu nhiệt độ, áp suất, độ ẩm tại điểm đo trên độ cao khoảng 2 m (mẫu sổ đo theo phụ lục 2).
- Ghi chép lại sơ đồ ghi chú điểm, tình trạng thời tiết, tình trạng mốc, địa hình, địa vật quanh điểm đo.
8. Khi kết thúc đo máy thu được đưa về trụ sở trung tâm và làm ngay các công việc sau:
- Sử dụng chương trình DOWNLOAD-DATA để trút số liệu vào máy tính.
- Nạp ngay ắc quy đến tình trạng đầy.
- Tính toán khái lược trị đo GPS.
III. TÍNH TOÁN KHÁI LƯỢC
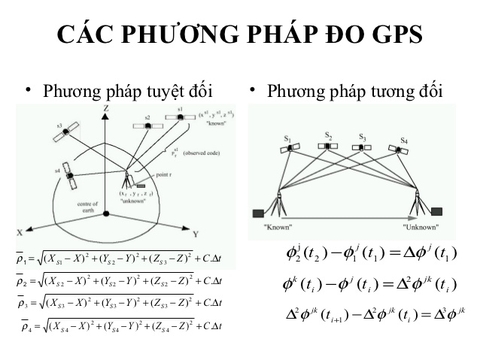
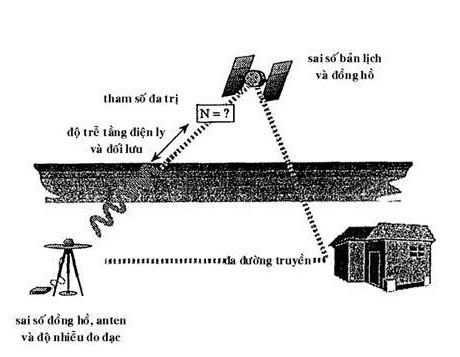
Sau khi các máy thu GPS thu đồng thời các tín hiệu vệ tinh chúng ta phải tính toán khái lược để thu được gia số tọa độ DX, DY, DZ giữa các điểm đặt máy thu và ma trận phương sai tương ứng. Quá trình tính toán khái lược phải tuân theo các quy định sau:
Bước 1: Chuẩn bị số liệu tính gia số toạ độ giữa 2 điểm đo đồng thời.
Trong bước này chúng ta phải đưa vào các tham số sau:
- Tên điểm đo thứ nhất, độ cao ăngten máy thu, nhiệt độ, áp suất, độ ẩm tại điểm.
- Tên điểm đo thứ hai, độ cao ăngten máy thu, nhiệt độ, áp suất, độ ẩm tại điểm.
- Toạ độ B, L, H của điểm chọn làm điểm đầu cạnh trong hệ toạ độ WGS-84.
Bước 2: Tính các lời giải TRIPLE, FLOAT và FIXED theo chế độ tự động, đặt chế độ tính độc lập từng cạnh.
Khởi động chương trình tính cạnh (TRIMMBP, WAVE) với các số liệu vào là tập hợp trị đo là hai điểm đo và các tham số phụ như độ cao anten máy thu, nhệt độ, áp suất, độ ẩm tại hai điểm đo, số liệu ra là các lời giải TRIPLE, FLOAD và FIXED chứa kết quả gia số toạ độ, ma trận phương sai và các chỉ số đánh giá sai số RDOP, RMS, riêng lời giải FIXED có thêm chỉ số F. Các lời giải này được ghi vào tập hợp có dạng " TEN.TRP ", " TEN.FLT ", " TEN.FIX" theo mã ASCII và có thể in ra dưới dạng văn bản.
Bước 3: Chọn lựa lời giải theo các chỉ tiêu đánh giá sai số.
Theo các chỉ tiêu đánh giá sai số trên ta so sánh với mức chuẩn
RDOP  0.1 cho cả 3 lời giải
0.1 cho cả 3 lời giải
RMS < K cho cả 3 lời giải
K cho cả 3 lời giải
F > 3 - 0,02 D cho lời giải FIXED
trong đó D là khoảng cách giữa 2 điểm đo tính bằng km và K là giá trị cho trong bảng sau đây:
|
D (km) |
1 |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
50 |
60 |
|
K |
0.020 |
0.040 |
0.060 |
0.075 |
0.090 |
0.102 |
0.115 |
0.127 |
0.140 |
0.155 |
0.170 |
Để lựa chọn lời giải chúng ta ưu tiên lời giải FIXED tức là nếu đạt cả 3 tiêu chuẩn F, RDOP, RMS thì chọn lời giải này. Nếu lời giải FIXED không đạt yêu cầu thì phải tính lại theo qui trình bán tự động sẽ trình bày trong bước 5. Nếu lời giải FIXED của qui trình bán tự động cũng không đạt tiêu chuẩn thì ta phải chọn lời giải FLOAT hoặc TRIPLE . Với khoảng cách nhỏ hơn 50 km ta xem xét tới lời giải FLOAT, nếu đạt tiêu chuẩn RMS và RDOP thì tiếp nhận, nếu không đạt tiêu chuẩn thì phải đo lại. Với khoảng cách lớn hơn 50 km ta xem xét tới lời giải TRIPLE với tiêu chuẩn RMS và RDOP giống như lời giải FLOAT.
Bước 4: Tính toán theo quy trình bán tự động
Nếu lời giải FIXED trong qui trình tính toán tự động không đạt tiêu chuẩn F, RDOP,RMS thì chúng ta phải tính toán lại theo qui trình bán tự động. Qui trình này có các bước sau:
a. Khử trị đo bị gián đoạn (CYCLE SLIPS)
Một trong những nguyên nhân làm trị đo GPS không đạt tiêu chuẩn là do nhiễu khi thu tín hiệu. Nhiễu quan trọng nhất là nhiễu do môi trường ngoại cảnh gây sự gián đoạn tín hiệu. Tình trạng gián đoạn này cũng được khắc phục trong qui trình tính toán tự động nhưng không triệt để. Khi quá trình đo bị gián đoạn nhiều chúng ta có thể khắc phục triệt để bằng phương pháp đồ thị trên màn hình và các quyết định cụ thể của người điều khiển máy tính. Khi đã khắc phục hết gián đoạn thì đồ thị sẽ báo cho người điều khiển biết.
b. Đặt các tham số lọc thích hợp.
Ngoài nhiễu gián đoạn tín hiệu, môi trường còn làm tín hiệu bị méo. Tình trạng méo tín hiệu cũng được khắc phục trong qui trình tính toán tự động. Khi tín hiệu bị méo quá lớn chúng ta cũng có thể khắc phục bằng qui trình tính toán bán tự động. Lúc này đòi hỏi người điều khiển máy phải có kinh nghiệm nhiều để xác định các tham só lọc thích hợp.
Sau khi tính xong cạnh thứ nhất, sử dụng kết quả tính toạ độ của điểm cuối cạnh làm toạ độ khởi tính cho cạnh thứ 2, cứ như thế tính lan truyền tất cả các cạnh của lưới.
Kết quả của quy trình tính toán bán tự động cũng là các tập hợp lời giải FIXED, FLOAT và TRIPLE. Để xác định lời giải chấp nhận được hay không cũng phải căn cứ vào các chỉ tiêu đánh giá sai số F, RDOP, RMS đã nói ở trên.
Quy trình tính toán bán tự động đòi hỏi kinh nghiệm nhiều hơn quy tắc. Nếu chúng ta chưa có người sử dụng phần mềm GPS có kinh nghiệm thì chúng ta có thể quyết định đo lại.
IV. BÌNH SAI LƯỚI GPS
Sau khi tính toán khái lược xong toàn bộ trị đo trong lưới chúng ta tiến hành bình sai toàn lưới. Tùy theo yêu cầu của hệ quy chiếu chúng ta quyết định phương án bình sai thích hợp. Sau đây sẽ giới thiệu các bước chính của quy trình công nghệ theo phần mềm bình sai của hãng Trimble Navigation.
1. Bình sai mặt phẳng.
Để tiến hành bình sai lưới GPS chúng ta thực hiện các bước sau:
Bước 1: Xây dựng lưới (GPSNET):
- Đưa toàn bộ các tập tin tính cạnh (tập tin *.ssf) vào thư mục tương ứng và chạy thực đơn xây dựng lưới;
- Kiểm tra toàn bộ thông tin về lưới đã được lập, đặc biệt là kiểm tra sai số khép.
Bước 2: Bình sai sơ bộ lưới:
- Từ thực đơn xây dựng lưới (GPSNET) chuyển sang thực đơn bình sai lưới (Network adjustment);
- Định nghĩa hệ quy chiếu (Datum Definition)
- Định nghĩa hệ toạ độ trắc địa (geographic) hoặc hệ toạ độ phẳng;
- Nhập toạ độ của một điểm khởi tính nằm ở trung tâm lưới;
- Đặt chế độ trọng số chung cho toàn lưới (All GPS Solutions - Default), đặt chế độ chỉ bình sai mặt phẳng;
- Tiến hành bình sai lưới;
- Vào thực đơn hiển thị kết quả (Display) để kiểm tra, so sánh kết quả bình sai với toạ độ của các điểm khởi tính khác. Thông thường nếu độ lệch >0.3m thì xem xét để không sử dụng điểm đó làm điểm khởi tính.
Bước 3: Bình sai lưới:
- Nhập toạ độ của tất cả các điểm khởi tính;
- Đặt chế độ tự xác định trọng số cho từng trị đo GPS (Each GPS Solutions - Alternative), đặt chế độ bình sai: bình sai mặt phẳng;
- Tiến hành bình sai lưới cho đến lúc sai số trung phương trọng số đơn vị bằng 1 (Reference Factor = 1).
Bước 4: Biên tập kết quả đo theo mẫu.
2. Bình sai độ cao :
Bình sai độ cao tiến hành theo các bước sau đây:
Bước 1 và bước 2: Thực hiện như bước 1 và bước 2 phần bình sai mặt phẳng. Lưu ý ở bước 2 phải nhập độ cao trắc địa của điểm khởi tính và sau khi bình sai sơ bộ tiến hành kiểm tra xem xét độ cao trắc địa của các điểm khởi tính khác. Thông thường nếu độ lệch H >0.5 m thì xem xét để không sử dụng điểm đó làm điểm khởi tính.
Bước 3: Từ thực đơn bình sai chuyển sang thực đơn lưới mặt đất (Terrestrial Network Module), vào thực đơn Geoid Module, vào tiếp “Load Geoid Model” để nhập mô hình geoid lựa chọn. Khi chọn mô hình EGM96 thì nhập tên WW15MGH, nếu chọn mô hình Geoid địa phương hoặc mô hình Geoid xây dựng riêng cho lưới trắc địa đang bình sai thì nhập tên mô hình đó. Tiếp theo vào thực đơn “Estimate Geoid Height” chọn “Creat DCO File” và “Create Network Point Listing”; quay trở lại thực đơn trước (Geoid Model) để chuyển sang thực đơn “Terrestrial Observations Module”. Vào thực đơn “Station Coordinates”, chọn “Modify Station Data”, nhập độ cao thuỷ chuẩn của 1 điểm trong lưới. Quay lại thực đơn “Terrestrial Observations Module”, chọn “Computation Utilities”, chọn tiếp “Compute Network”, qauy trở lại thực đơn “Terrestrial Observations Module” và chọn thực đơn “Network Adjustment Module”.
Bước 4: Bình sai độ cao:
- Nhập độ cao trắc địa H và độ cao thuỷ chuẩn h của tất cả các điểm khởi tính đã lựa chọn;
- Đặt chế độ tự xác định trọng số cho từng trị đo GPS và Geoid Model (Each GPS Solutions - Alternative), đặt chế độ bình sai: bình sai độ cao;
- Tiến hành bình sai lưới cho đến lúc sai số trung phương trọng số đơn vị bằng 1 (Reference Factor = 1).
Bước 5: Biên tập kết quả đo theo mẫu.
-----------------------------------------------
* Trắc địa Hoàng Minh là công ty uy tín chuyên nhập khẩu và phân phối các loại máy định vị GPS chính hãng như: Trimble, Geomax, Sokkia, Topcon, Nikon, Leica, South, Kolida, CHC, Comnav, Ruide...
* Trắc địa Hoàng Minh tự hào là địa chỉ tin cậy của khách hàng!
* Truy cập website tracdiahoangminh.com để tham khảo thêm nhiều dòng sản phẩm khác.







































 0942441166
0942441166
Viết bình luận