CÁC PHƯƠNG PHÁP ĐO GÓC BẰNG
Tùy theo số hướng tại một trạm đo mà ta có thể áp dụng các phương pháp đo góc khác nhau như đo đơn, đo lặp, đo toàn vòng, đo tổ hợp. Giáo trình này chỉ trình bày hai phương pháp đo góc cơ bản là đo đơn và đo toàn vòng
a. Đo góc bằng theo phương pháp đo đơn:
|
Phương pháp đo đơn áp dụng cho các trạm đo chỉ có hai hướng và được áp dụng nhiều khi đo góc bằng trong các đường chuyền đa giác. Một vòng đo theo phương pháp đo đơn gồm nửa vòng đo thuận và nửa vòng nghịch. Giả sử đo góc bằng tại đỉnh O hợp bởi hướng ngắm OA và OB (hình 3.14), trình tự đo được thực hiện như sau: |
 |
* Đặt máy và dựng tiêu
Dựng tiêu ngắm tại điểm A và B; đặt máy kinh vĩ tại đỉnh O và tiến hành định tâm, cân bằng, định hướng.
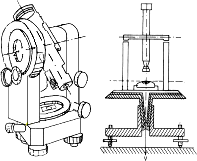
- Định tâm là thao tác để chiếu đỉnh góc cần đo trên mặt đất theo phương đường dây dọi sao cho trùng với tâm bàn độ ngang của máy kinh vĩ. Việc định tâm được thực hiện bằng dây dọi hoặc bộ phận định tâm quang học. Để định tâm bằng dây dọi, ta phải mắc dọi vào đầu trục quay VV' của máy kinh vĩ. Điều chỉnh ba chân máy sao cho đầu quả dọi đi qua đỉnh góc cần đo.
Khi định tâm quang học, trước tiên ta điều chỉnh chân máy hoặc ốc cân đế máy sao cho tâm vòng tròn bộ định tâm quang học trùng với đỉnh góc đo. Sau đó cân bằng máy bằng ba ốc cân chân máy, các thao tác này được lặp lại cho đến khi đỉnh góc đo ở trong vòng tròn. Tiếp theo ta cân bằng máy bằng ba ốc cân đế máy, nếu sau khi cân bằng mà đỉnh góc lệch khỏi vòng tròn thì mở ốc nối, xê dịch đế máy cho trùng lại và tiến hành cân bằng lại máy là được.
- Cân bằng máy là thao tác để điều chỉnh cho mặt phẳng bàn độ về ngang nằm ngang. Thực hiện cân bằng nhờ ống thủy tròn (sơ bộ), ống thủy dài (chính xác), các ốc cân đế máy và chân máy.
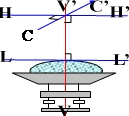
| Khi cân bằng, đầu tiên quay bộ phận ngắm sao cho trục ống thủy dài bàn độ ngang song song với đường nối hai ốc cân bất kỳ, điều chỉnh hai ốc cân này đưa bọt thủy vào giữa ống. Sau đó quay bộ phận ngắm đi 90o, điều chỉnh ốc cân thứ ba để bọt thủy vào giữa ống. Các thao tác này được lặp lại cho đến khi bọt thủy không lệch khỏi vị trí giữa ống quá một phân khoảng ống thủy là được (hình 3.15). |  |
 |
- Định hướng: để nâmg cao độ chính xác đo góc và giảm sai số do khắc vạch bàn độ không đều, khi đo góc ta phải đo nhiều vòng và giữa các vòng hướng khởi đầu cần đặt lệch nhau một lượng bằng 180o/n ( n là số vòng đo). Việc làm này được gọi là định hướng máy kinh vĩ. Việc định hướng thực hiện nhờ ốc điều chỉnh bàn độ ngang.
* Đo góc:
Một vòng đo góc bằng theo phương pháp đo đơn gồm nửa vòng đo thuận và nửa vòng
đo ngược.
- Nửa vòng đo thuận kính: Bàn độ đứng đặt bên trái hướng ngắm, ngắm chuẩn tiêu ngắm A, đọc số trên vành độ ngang được số đọc ký hiệu a1. Quay bộ phận ngắm thuận chiều kim đồng hồ, ngắm chuẩn tiêu ngắm B, đọc số trên bàn độ ngang được số đọc ký hiệu là b1. Như vậy ta đã hoàn thành nửa vòng đo thuận, trị số góc nửa vòng thuận βt = b1 - a1.
- Nửa vòng đo ngược: kết thúc nửa vòng đo thuận ống kính đang trên hướng OB, thực hiện đảo ống kính và quay máy ngắm lại tiêu ngắm B; đọc số trên bàn độ ngang được số đọc b2. Máy quay thuận chiều kim đồng hồ ngắm tiêu ngắm A, đọc số trên bàn độ ngang được số đọc a2 . Đến đây ta đã hoàn thành nửa vòng đo ngược và cũng hoàn thành một vòng đo theo phương pháp đo đơn. Góc nửa vòng đo nghịch βp = b2 - a2 ; nếu độ lệch trị số góc giữ hai nửa vòng đo nằm trong giới hạn cho phép thì trị số góc tại vòng đo này là: β1v = (βt + βp)/2. Kết quả đo góc bằng theo phương pháp đo đơn được ghi vào sổ đo ở bảng 3.1.
| Vòng đo | Tram đo | Điểm ngắm | Vị trí bàn độ | Số đọc bàn độ ngang |
Nửa vòng đo |
góc kép Một vòng đo |
Trung bình |
| 1 | 0 | A | T | 00o00’00’’ | 35o16’24’’ | ||
| B | T | 35o16’24’’ | 35o16’18’’ | ||||
| B | P | 215o16’30’’ | 35o16’12’’ | ||||
| A | P | 180o00’18’’ |
Một số lưu ý khi đo góc bằng theo phương pháp đo đơn:
- Trong một vòng đo không được thay đổi vị trí bàn độ ngang.
- Trong suốt quá trình đo máy luôn quay thuận chiều kim đồng hồ để hạn chế sai số do bàn độ ngang bị kéo theo bộ phận ngắm.
b. Đo góc bằng theo phương pháp toàn vòng
|
Phương pháp đo góc toàn vòng áp dụng cho các trạm đo góc bằng có từ 3 hướng trở lên, phương pháp này được ứng dụng nhiều khi đo góc trong lưới giải tích. Một vòng đo theo phương pháp này cũng gồm nửa vòng đo thuận và nửa vòng đo ngược. Giả sử cần đo góc bằng tại trạm O có ba hướng là OA, OB, OC (hình 3.16). Để đo, trước tiên cần đặt máy kinh vĩ vào trạm O và thực hiện định tâm, cân bằng, định hướng tương tự như phương pháp đo đơn; sau đó tiến hành đo góc theo trình tự: |
 |
- Nửa vòng đo thuận: bàn độ đứng đặt bên trái hướng ngắm. Trước tiên ngắm chuẩn tiêu ngắm A, rồi lần lượt các tiêu ngắm ở các điểm B, C và A theo chiều kim đồng hồ; mỗi hướng đo đều tiến hành đọc số bàn độ ngang và ghi giá trị vào sổ đo góc.
- Nửa vòng đo ngược: kết thúc nửa vòng đo thuận thì ống kính đang ngắm về hướng OA. Tiến hành đảo ống kính và quay máy ngắm và đọc số lại hướng này; sau đó quay bộ phận ngắm ngược chiều kim đồng hồ lần lượt ngắm các tiêu trên hướng OC, OB và OA. Ở mỗi hướng đều đọc số bàn độ ngang và ghi trị số các hướng đo vào sổ đo góc bằng (bảng 3.1).
Bảng 3.1.Sổ đo góc theo phương pháp toàn vòng
| Vòng đo | Trạm đo | Điểm ngắm | VTBĐ | Số đọc bàn đô ngang | 2C | Trị số hướng TB | Vi | Trị số hướng hiệu chỉnh | Góc kẹp | TB |
| 1 | 0 | A | T | 00o00'06'' | 00o00'03'' | 0 | 00o00'03'' | |||
| P | 180o00'00'' | +6'' | 51o12'19'' | |||||||
| B | T | 51o12'30' | 51o12'27'' | -5'' | 51o12'22'' | |||||
| P | 231o12'24'' | +6'' | 31o14'37'' | |||||||
| C | T | 82o27'12' | 82o27'09' | -10'' | 82o26'59' | |||||
| P | 262o27'06'' | +6'' | 277o33'04'' | |||||||
| A | T | 00o00'24'' | 00o00'18'' | -15'' | 00o00'03'' | |||||
| P | 180o00'12'' | +12'' | ||||||||
| +15'' | -5'' |
Để tăng độ chính xác đo góc cần phải đo nhiều vòng đo, trị hướng khởi đầu mỗi vòng đo đặt lệch một lượng 180o/n ( n là số vòng đo ). Biến động 2c £ 2t; sai số khép vòng fv £ 2t với "t " là độ chính của bộ phận đọc số.
c. Các nguồn sai số chủ yếu trong đo góc bằng
Khi đo góc, mỗi lần ngắm chuẩn mục tiêu ở một hướng sẽ mắc phải sai số ngắm mV và sai số đọc số mo hai sai số này được xác định bởi:
 m = ± 60'' ; mo = 0,15t
m = ± 60'' ; mo = 0,15t
v V (3.6)
Trong đó: v - độ phóng đại ống kính; t - độ chính xác của bộ phận đọc số máy kinh vĩ. Như vậy sai số trung phương đo trên một hướng với một lần đo sẽ là :
md = 
Tổng hợp các nguồn sai số trên một hướng đo gồm: sai số do máy - m1, sai số do lệch tâm máy m2 , sai số do lệch tâm tiêu m3, sai số đo md và sai số do ảnh hưởng của môi trường m5. Với sai số do định tâm máy và tiêu ngắm được xác định bởi công thức (3.7).
D = e .r ''( 1 + 1 ) ; d = e .r '' 1 (3.8)
* Trắc địa Hoàng Minh là công ty uy tín chuyên nhập khẩu và phân phối các loại máy thủy bình, máy toàn đạc điện tử, máy kinh vỹ điện tử, máy định vị GPS, máy cân bằng laser, máy đo khoảng cách laser... chính hãng.
* Trắc địa Hoàng Minh tự hào là địa chỉ tin cậy của khách hàng!
* Truy cập website tracdiahoangminh.com để tham khảo thêm nhiều dòng sản phẩm khác.






































 0942441166
0942441166
Viết bình luận